September 2016-March 2017, Team of Eight

The Task: AIMGRO (Aerial Insertion Micro Ground RObot)
Create a lightweight robot that can survive a drop from a quadcopter and relay video.
As a capstone engineering project, the team was commissioned by Physical Sciences Inc. (PSI) to build a payload for the InstantEye aerial vehicle that can provide ground based surveillance; to look under cars and other areas inviable for the air vehicle’s cameras.
To complete this project, the team worked with PSI and faculty advisors for seven months to create a robot that suited the sponsor’s specifications.
Final design specifications for the prototype, the desired prototype specifications, and the final product specifications are listed below, along with a column showing whether the prototype met the threshold or the final product specification.

Results:

Starting from basic sketches, the team built and tested a variety of designs to minimize weight and maximize impact survivability. A two-wheeled design was selected in order to minimize the number of actuators.

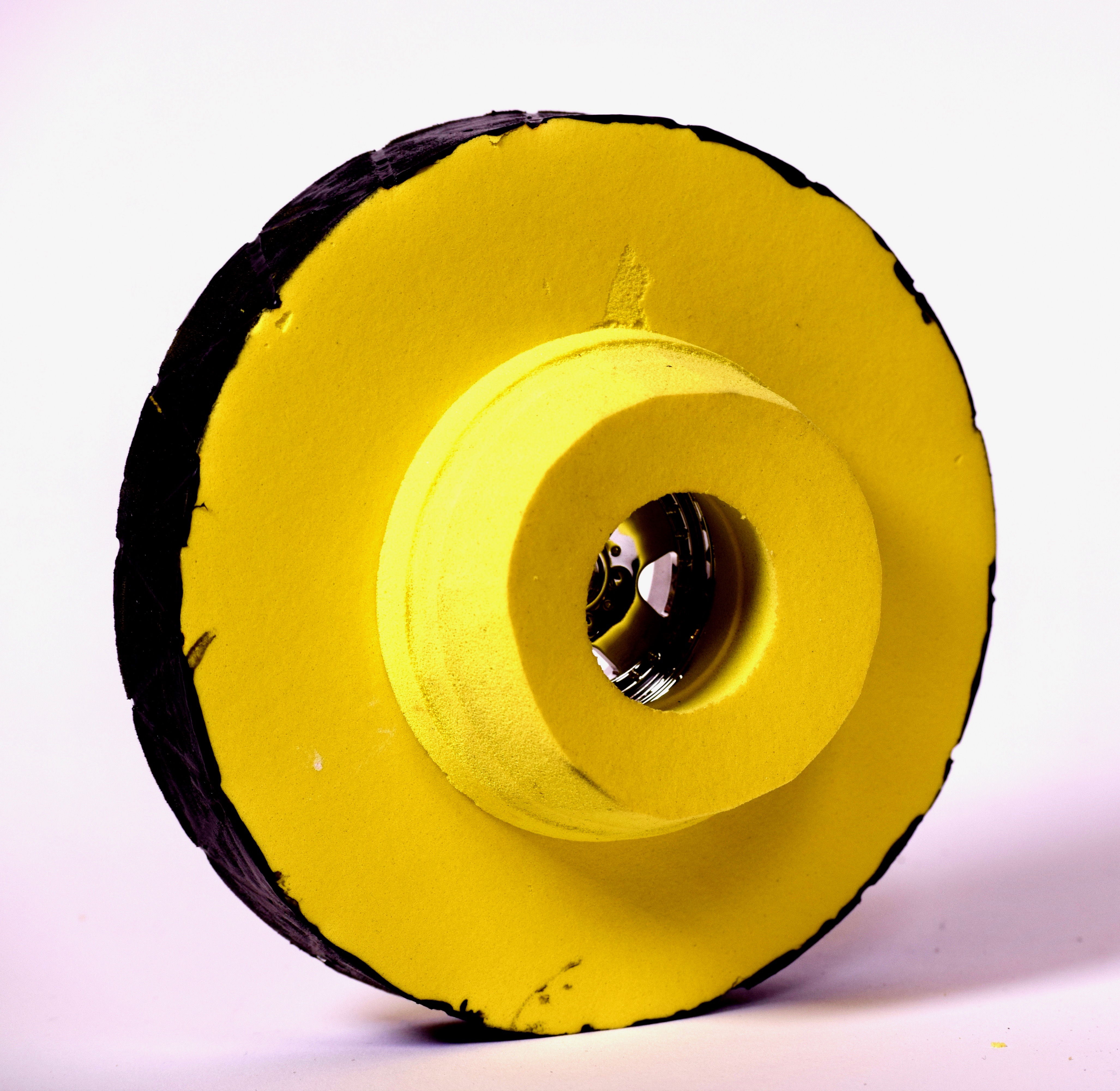
With no large drag mechanism (for discreteness), the wheels were the essential impact absorbing element of the design. A weighted pendulum simulated the forces (but not the kinetic energy) of impact, measured by an attached accelerometer. This set up was used to test a multitude of wheels for impact properties.
Poron XRD wheels were selected for their low weight and superior damping properties.

Electronics were housed in an interior casing, including the motors which attached to a flexible drivetrain.


My Primary Contributions:
- Researched state of the art designs
- Initial design sketches
- Calculated necessary axle strength and survivable final velocity
- Conducted mobility and drop testing
- Conducted failure modes effects and criticality analysis
- Used Solidworks finite element analysis to determine the force load path
- Machining carbon fiber and test components
- Maintained an up-to-date bill of materials with component masses
Download Final Report
Download Final Presentation


{kind=link}
Additional Design Sketches

AIMGRO vehicle

Free Body Diagram

Plastic tails
